ЧАЬсЬѕМў
дкЛњЦїШЫПижЦЯЕЭГгыЭјТчвбСЌНгЕФЬѕМўЯТЃЌгВХЬгГЩфПЩжБНгБЃДцЕНвЛИіЭјТчЧ§ЖЏЦїРяЁЃ
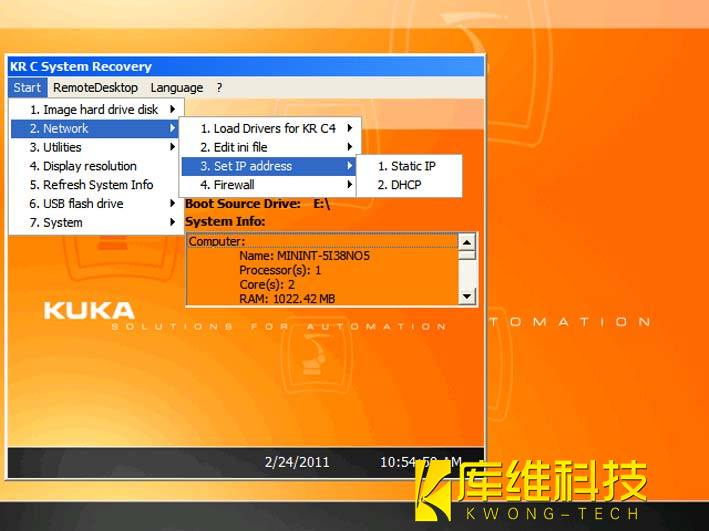
ЭООЖ ЩшжУ IP ЕижЗ
1 ЙЬЖЈ IP ЕижЗ

2 Ншжњ DHCP
гУгГЩфЮФМўЖЈвхЧ§ЖЏЦї
3 Ч§ЖЏЦївбДцдк

Шчдк NetCon.ini РяЖЈвхСЫвЛИіЭјТчЧ§ЖЏЦїЃЌФЧУДЫќНЋБЛГЄЦкБЃДц3 Ч§ЖЏЦїЛЙПЩБЛЖЈвхЮЊаэПЩЕЅДЮЗУЮЪЁЃ
АДађДђПЊВЫЕЅЃК ПЊЪМ > ЭјТч > БрМ ini ЮФМў > NetCon.ini ЁЃ
ВйзїВНжшЃК
1. ЙиБеЙЄвЕЛњЦїШЫ
ПижЦЯЕЭГОВФЌФЃЪН ЃЈАцБО = ОВФЌЃЉ
2. ВхЩЯОпгаЦ№ЖЏЙІФмЕФПтПЈ U ХЬЃЌШЛКѓжиЦєЙЄвЕЛњЦїШЫПижЦЯЕЭГЁЃ
3. АДађДђПЊВЫЕЅЃК ПЊЪМ > ЭјТч > БрМ ini ЮФМўЁЃЖдЮФМў NetCon.ini КЭ SetIPAddress.ini НјааБрМЁЃ

4. АДађДђПЊВЫЕЅЃК ПЊЪМ > ЭјТч > ЩшжУ IP ЕижЗЁЃбЁдёЪЙгУЙЬЖЈ IP ЕижЗЛЙЪЧ DHCPЁЃ
5. АДађДђПЊВЫЕЅЃК ПЊЪМ >
гГЩф > ЩњГЩгГЩфЁЃ
ДДНЈгГЩфШчЯТЭМЃК
6. ДАПк ЁО Continue on boot mediumЁПДђПЊЁЃ
бЁШЁ BootstickШчЯТЭМЃК
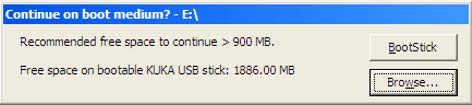
бЁдё ЁО ЦєЖЏ U ХЬЁПМќЁЃ
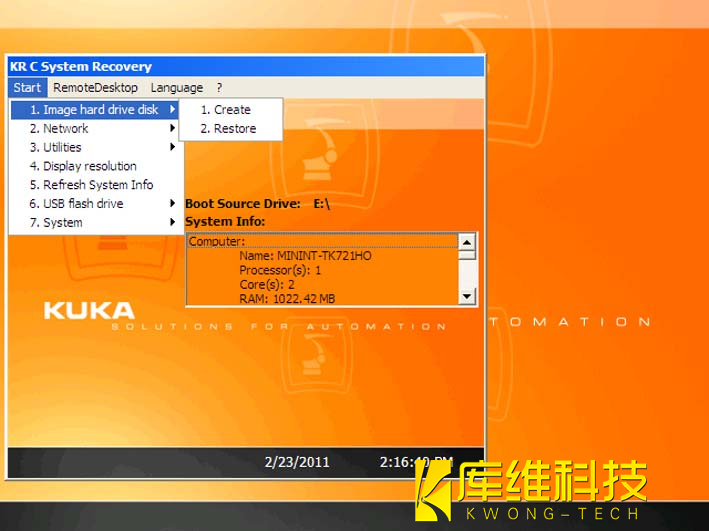
7. ДАПк ЁО HDD CreationЁПДђПЊЁЃ
ФПТМбЁдёШчЯТЭМЃК
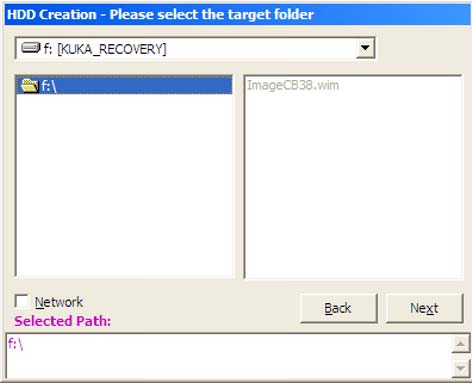
8. дк ЭјТч ЩшЖЈЫљашЕФЙДбЁРИЁЃ
9. дкДАПк ЁО ЕЧТМЭјТчЁПЪфШыЕЧТМЪ§ОнвдСДНгЭјТчЧ§ЖЏЦїЃК
ЕЧТМЭјТчШчЯТЭМЃК
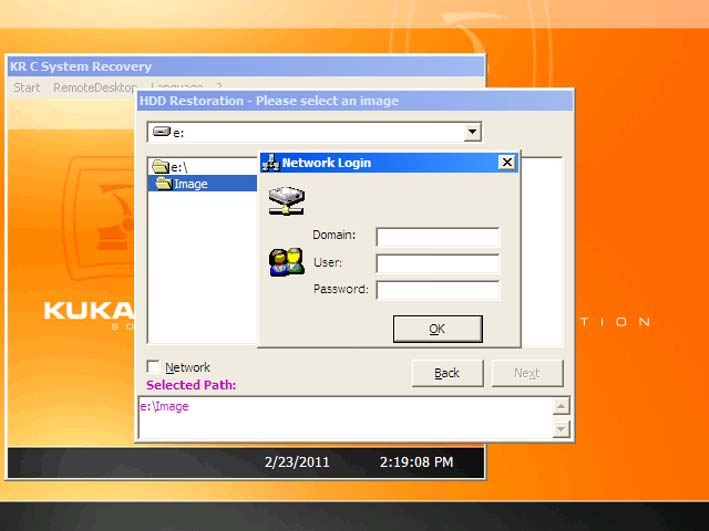
1 гђУћ ЃЈШчДцдкЃЉ
2 гУЛЇУћ
3 УмТы
гУ ЁО ШЗЖЈЁПМќШЗШЯГЩЙІНЈСЂгГЩфКѓЃЌНЋГіЯжвЛЬѕШЗШЯбЖЯЂ
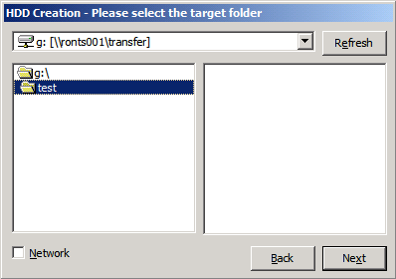
10. бЁжаЭјТчЧ§ЖЏЦїЃЌШЛКѓЖЈЮЛгВХЬгГЩфашБЃДцЕФЮФМўМаЁЃ ЕуЛї ЁО ЯТвЛВНЁПМќМЬајЁЃ
дкЭјТчЧ§ЖЏЦїЩњГЩ HDDШчЯТЭМЃК
11. ЪфШыгВХЬгГЩфУћГЦЃЌШЛКѓЕуЛї ЁО ШЗЖЈЁПМќШЗШЯЁЃЮЊЗжЧј C КЭЗжЧј D НЈСЂЯрЛЅЖРСЂЕФДцДЂЦїгГЩфЃЌШЛКѓБЃДцЕНбЁЖЈЕФЮФМўМаЁЃ
12. АДађДђПЊВЫЕЅЃК ПЊЪМ > ЯЕЭГ > жиЦєЁЃвВПЩАДађДђПЊВЫЕЅЃК ПЊЪМ > ЯЕЭГ > ЙиЛњЃЌШЛКѓНЋ U ХЬАЮГіЁЃ